Примеры сетевых топологий
TCP-Tahoe
Алгоритм TCP-Tahoe является наиболее старым и широко распространенным []. Этот алгоритм был сформулирован Джакобсоном в 1988 году, некоторые коррекции были внесены в него позднее.
Если буфер переполнен, какое-то число сегментов будет потеряно. При этом может быть запущено несколько сценариев. Основной вариант - медленный старт, запускается в рамках классического алгоритма ТСР-Tahoe при потере сегмента и сопряженным с ним таймаутом (RTO) у отправителя, так как отправитель не получит сигнала подтверждения ACK для потерянного сегмента. Медленный старт предполагает установку окна перегрузки (CWND) равным 1, а порога медленного старта (ssthresh) равным половине значения CWND, при котором произошел таймаут. Сокращение CWND до единицы происходит потому, что отправитель не имеет никакой информации о состоянии сети. Далее после каждого подтверждения CWNDi+1 = CWNDi +1. Эта формула работает до тех пор, пока CWND не станет равным
ssthresh. После этого рост CWND становится линейным (смотри формулу 1). Смысл этого алгоритма заключается в удержании значения CWND в области максимально возможных значений. По существу эта оптимизация осуществляется с помощью потери пакетов. Если потери пакетов не происходит, значение CWND достигает значения window по умолчанию, задаваемого при конфигурации ТСР-драйвера. На рис. 2 показана эволюция CWND при потере пакетов.
Рис. 2.
Значение таймаута вычисляется по формуле:

где s - средне-квадратичное отклонение среднего значения RTT.
Потерянный пакет и все, посланные после него, пакеты (вне зависимости оттого, подтверждено их получение или нет) пересылаются повторно. При большой вероятности потери это существенно понижает пропускную способность и увеличивает и без того высокую загрузку канала.
Может возникнуть вопрос, почему при потере пакета CWND делается равным 1, а не CWND-1 или CWND/2? Ведь эффективность канала максимальна при наибольшем, возможном значении CWND. Если произошла потеря пакета из-за переполнения буфера, оптимальное значение CWND может быть выбрано лишь при исчерпывающем знании прогноза состояния виртуального канала.
Постольку такая информация обычно недоступна, система переходит в режим освобождения буфера (CWND=1). Ведь если потеря была связана с началом сессии обмена с конкурирующим клиентом, операция CWND= CWND-1 проблему не решит. А потеря пакета вызовет таймаут и канал будет блокирован минимум на 1 секунду, что вызовет резкое падение скорости передачи.
Использование стартового значения CWND>1 может увеличить эффективность виртуального ТСР-канала. Стартовое значение CWND = 2*MSS представляется вполне разумным. Понятно, что в критических ситуациях CWND=1 должно быть непременно разрешено. На рис. 3. показана эволюция CWND (результат моделирования []) при двух последовательных медленных стартах (один из них может быть вызван случайной потерей сегмента). Отсюда видно, что случайные потери сильно понижают пропускную способность канала.
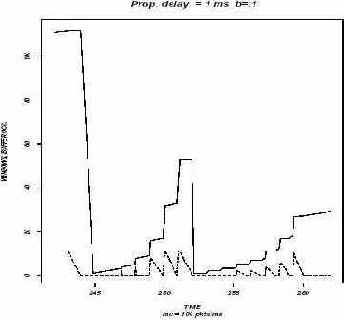
Рис. 3. Эволюция cwnd при двух медленных стартах
(T. V. Lakshman, Upamanyu Madhow, “The performance of TCP/IP for networks with high bandwidth-delay products and random loss”, IEEE/ACM Trans. Networking, V5, N3, p.336-350, June 1997)